树莓派上利用Tensorflow实现小车的自动驾驶
声明:本文转载自https://my.oschina.net/u/3858986/blog/2875027,转载目的在于传递更多信息,仅供学习交流之用。如有侵权行为,请联系我,我会及时删除。
先抛出大家最关心的——代码地址:https://github.com/Timthony/self_drive
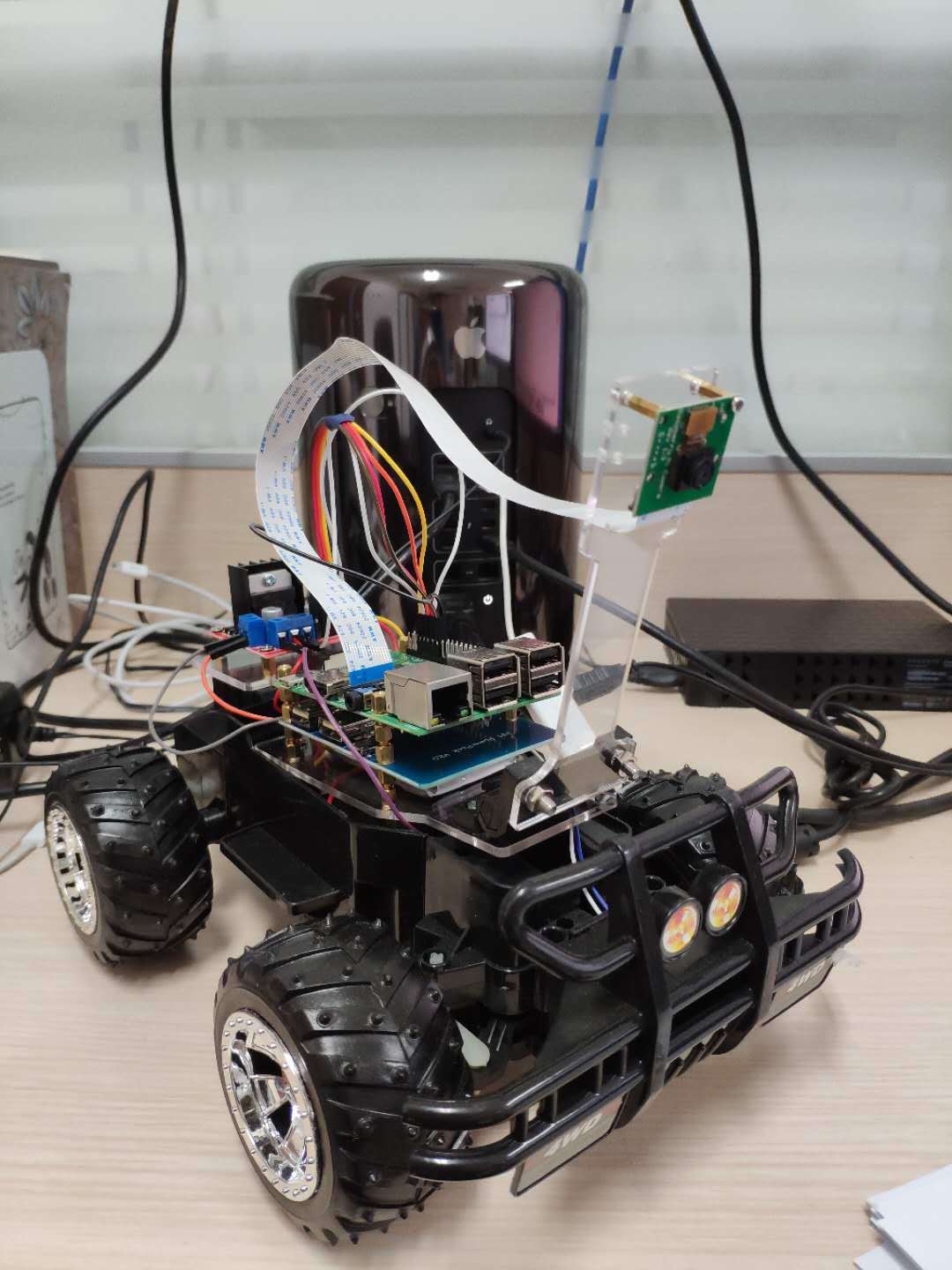
基于树莓派的人工智能自动驾驶小车
使用方法:
1. 先将树莓派小车硬件组装好
2. 使用zth_car_control.py来控制小车的前后左右移动,配合zth_collect_data.py来人工操作,使小车在自己制作的跑道进行数据采集。(该过程在树莓派进行)
3. 数据采集完成以后使用zth_process_img.py来对采集的数据进行处理,之前当前先完成一些数据清洗的工作。(电脑上执行)
4. 使用神经网络模型对数据进行训练zth_train.py,得到训练好的模型。(电脑上执行)
5. 在树莓派小车上使用zth_drive和训练好的模型,载入模型,即可实现在原先跑道的自动驾驶。(树莓派上执行)

抱拳了,老铁!
本文发表于2018年11月13日 10:00
(c)注:本文转载自https://my.oschina.net/u/3858986/blog/2875027,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。如有侵权行为,请联系我们,我们会及时删除.
阅读 2838 讨论 0 喜欢 0
